A simple data structure for deriving Local or Global waypoints. More...
#include <waypoint.h>
Public Member Functions | |
| Waypoint () | |
| Constructor. | |
| virtual | ~Waypoint () |
| Destructor. | |
| void | SetCurrentWaypoint (const bool onFlag=true) |
| Method to set this waypoint as the current/active waypoint being navigated to by the unmanned system. | |
| void | SetWaypointAcheived (const bool flag=true) |
| Method to mark a waypoint as finished. | |
| bool | IsCurrentWaypoint () const |
| bool | IsWaypointAcheived () const |
| virtual bool | IsSameAs (const Waypoint *waypoint, const double errorInMeters=0.25) const =0 |
Protected Attributes | |
| bool | mActiveFlag |
| Is this the current active waypoint we are driving to? | |
| bool | mFinishedFlag |
| Flag to mark if the waypoint is completed (for internal use only). | |
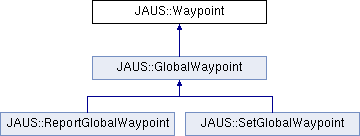
A simple data structure for deriving Local or Global waypoints.
This structure contains data common to all waypoints, but not necessarily data included in any message structures.
Definition at line 58 of file waypoint.h.
| Waypoint::Waypoint | ( | ) |
Constructor.
Definition at line 50 of file waypoint.cpp.
| Waypoint::~Waypoint | ( | ) | [virtual] |
Destructor.
Definition at line 60 of file waypoint.cpp.
| bool Waypoint::IsCurrentWaypoint | ( | ) | const |
return True if the waypoint is currently being navigated to, false otherwise.
Definition at line 100 of file waypoint.cpp.
| virtual bool JAUS::Waypoint::IsSameAs | ( | const Waypoint * | waypoint, |
| const double | errorInMeters = 0.25 |
||
| ) | const [pure virtual] |
Implemented in JAUS::GlobalWaypoint.
| bool Waypoint::IsWaypointAcheived | ( | ) | const |
return True if the waypoint has been marked as completed at some point in time, false otherwise.
Definition at line 108 of file waypoint.cpp.
| void Waypoint::SetCurrentWaypoint | ( | const bool | onFlag = true ) |
Method to set this waypoint as the current/active waypoint being navigated to by the unmanned system.
| [in] | onFlag | If true, sets as active, false otherwise. |
Definition at line 71 of file waypoint.cpp.
| void Waypoint::SetWaypointAcheived | ( | const bool | flag = true ) |
Method to mark a waypoint as finished.
This is just additional data that can be optionally used by a list driver or waypoint driver to mark that status of a waypoint. This data is not part of any current JAUS message.
| [in] | flag | If true, sets as finished, false otherwise. |
Definition at line 88 of file waypoint.cpp.
bool JAUS::Waypoint::mActiveFlag [protected] |
Is this the current active waypoint we are driving to?
Definition at line 74 of file waypoint.h.
bool JAUS::Waypoint::mFinishedFlag [protected] |
Flag to mark if the waypoint is completed (for internal use only).
Definition at line 75 of file waypoint.h.
 1.7.2
1.7.2

