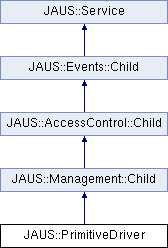
The Primitive Driver allows for basic platform mobility. More...
#include <primitivedriver.h>
Public Member Functions | |
| PrimitiveDriver () | |
| Constructor. | |
| virtual | ~PrimitiveDriver () |
| Destructor. | |
| virtual bool | SetWrenchEffort (const JAUS::SetWrenchEffort *command)=0 |
| virtual JAUS::SetWrenchEffort | GetCurrentWrenchEffort () const |
| Returns the current Wrench Effort command received. | |
| virtual Time | GetWrenchEffortTime () const |
| virtual bool | GenerateEvent (const Events::Subscription &info) const |
| Generates an event for the given information. | |
| virtual bool | IsEventSupported (const Events::Type type, const double requestedPeriodicRate, const Message *queryMessage, double &confirmedPeriodicRate, std::string &errorMessage) const |
| Checks if the event is supported by the Service. | |
| virtual bool | IsDiscoverable () const |
| virtual void | Receive (const Message *message) |
| Processes message received by the Service. If not supported, then message is passed to inheriting services depending on what type of control has been established for the component. | |
| virtual Message * | CreateMessage (const UShort messageCode) const |
| Attempts to create the message desired. Only message supported by this Service can be created by this Service. | |
| virtual void | PrintStatus () const |
| Prints the status of the Primitive Driver. | |
Static Public Attributes | |
| static const std::string | Name = "urn:jaus:jss:mobility:PrimitiveDriver" |
| String name of the Service. | |
The Primitive Driver allows for basic platform mobility.
wheeled, but describes mobility in six degrees of freedom using a percent of availible effort in each of the directions. Additionally, no power plant (gasoline, diesel, or battery) is implied and the service functions strictly in an open loop manner, i.e., a velocity is not commanded since that requires a speed sensor. Note that the specific actuator commands are not defined by JAUS.
Definition at line 67 of file primitivedriver.h.
| PrimitiveDriver::PrimitiveDriver | ( | ) |
Constructor.
Definition at line 54 of file primitivedriver.cpp.
| PrimitiveDriver::~PrimitiveDriver | ( | ) | [virtual] |
Destructor.
Definition at line 65 of file primitivedriver.cpp.
Attempts to create the message desired. Only message supported by this Service can be created by this Service.
| [in] | messageCode | Message to create. |
Implements JAUS::Service.
Definition at line 221 of file primitivedriver.cpp.
| bool PrimitiveDriver::GenerateEvent | ( | const Events::Subscription & | info ) | const [virtual] |
Generates an event for the given information.
| [in] | info | The event information (ID, Sequence #, etc.) for generation. |
Implements JAUS::Events::Child.
Definition at line 105 of file primitivedriver.cpp.
| SetWrenchEffort PrimitiveDriver::GetCurrentWrenchEffort | ( | ) | const [virtual] |
Returns the current Wrench Effort command received.
Definition at line 77 of file primitivedriver.cpp.
| Time PrimitiveDriver::GetWrenchEffortTime | ( | ) | const [virtual] |
Definition at line 89 of file primitivedriver.cpp.
| virtual bool JAUS::PrimitiveDriver::IsDiscoverable | ( | ) | const [inline, virtual] |
Implements JAUS::Service.
Definition at line 88 of file primitivedriver.h.
| bool PrimitiveDriver::IsEventSupported | ( | const Events::Type | type, |
| const double | requestedPeriodicRate, | ||
| const Message * | queryMessage, | ||
| double & | confirmedPeriodicRate, | ||
| std::string & | errorMessage | ||
| ) | const [virtual] |
Checks if the event is supported by the Service.
| [in] | type | The event type (Periodic/EveryChange). |
| [in] | requestedPeriodicRate | If type == Periodic, then this is the desired update rate. |
| [in] | queryMessage | The query message associated with the event. |
| [out] | confirmedPeriodicRate | This is the confirmed periodic rate supported by the Service. |
| [out] | errorMessage | If not supported, this is an optional error message. |
Implements JAUS::Events::Child.
Definition at line 143 of file primitivedriver.cpp.
| void PrimitiveDriver::PrintStatus | ( | ) | const [virtual] |
Prints the status of the Primitive Driver.
Reimplemented from JAUS::Service.
Definition at line 248 of file primitivedriver.cpp.
| void PrimitiveDriver::Receive | ( | const Message * | message ) | [virtual] |
Processes message received by the Service. If not supported, then message is passed to inheriting services depending on what type of control has been established for the component.
This Service supports PrimitiveDriver related messages only.
| [in] | message | Message data to process. |
Reimplemented from JAUS::Service.
Definition at line 170 of file primitivedriver.cpp.
| virtual bool JAUS::PrimitiveDriver::SetWrenchEffort | ( | const JAUS::SetWrenchEffort * | command ) | [pure virtual] |
const std::string PrimitiveDriver::Name = "urn:jaus:jss:mobility:PrimitiveDriver" [static] |
String name of the Service.
Definition at line 70 of file primitivedriver.h.
 1.7.2
1.7.2

